Arduino Rotary Encoder Roboromania Tutorial pentru începători
![]()
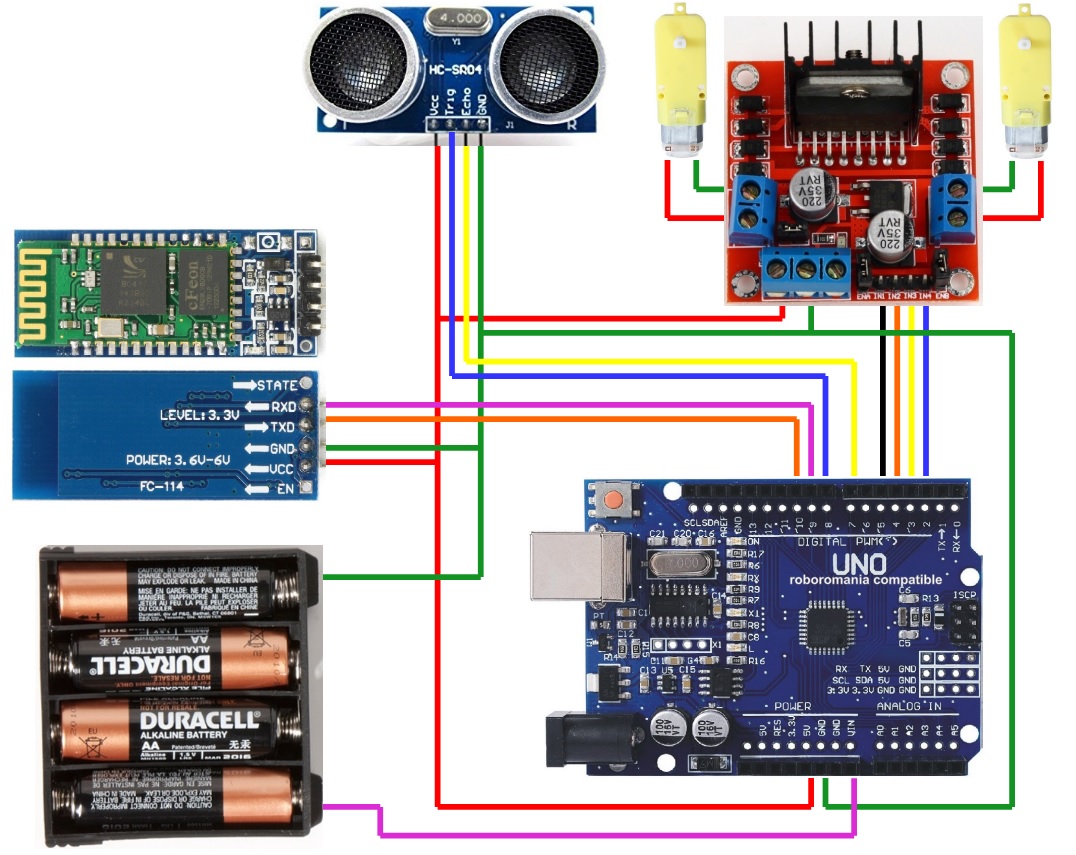
O schema simpla :
Afișează pe serial poziția encoderului

Și un cod simplu :
// Arduino Rotary Encoder Tutorial
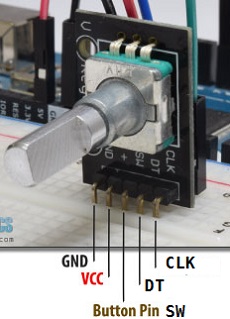
int encoderCLK = 2;
int encoderDT = 4;
volatile int lastEncoded = 0;
volatile long encoderValue = 0;
long lastencoderValue = 0;
int lastMSB = 0;
int lastLSB = 0;
void setup() {
Serial.begin (9600);
pinMode(encoderCLK, INPUT);
pinMode(encoderDT, INPUT);
digitalWrite(encoderCLK, HIGH); //turn pullup resistor on
digitalWrite(encoderDT, HIGH); //turn pullup resistor on
//call updateEncoder() when any high/low changed seen
//on interrupt 0 (pin 2), or interrupt 1 (pin 3)
attachInterrupt(0, updateEncoder, CHANGE);
attachInterrupt(1, updateEncoder, CHANGE);
}
void loop(){
Serial.println(encoderValue);
delay(10);
}
void updateEncoder(){
int MSB = digitalRead(encoderCLK); //MSB = most significant bit
int LSB = digitalRead(encoderDT); //LSB = least significant bit
int encoded = (MSB << 1) |LSB; //converting the 2 pin value to single number
int sum = (lastEncoded << 2) | encoded; //adding it to the previous encoded value
if(sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) encoderValue ++;
if(sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) encoderValue –;
lastEncoded = encoded; //store this value for next time
}
// Arduino Rotary Encoder Tutorial
Pentru butonul SW folosim exemplu clasic de la Arduino :
// Button
// set pin numbers:
const int buttonPin = 5; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH:
if (buttonState == HIGH) {
// turn LED on:
digitalWrite(ledPin, HIGH);
} else {
// turn LED off:
digitalWrite(ledPin, LOW);
}
}
// Button
Succes !
Colectivul Roboromania




 Leduri : rosu(pin7) și verde(pin8) și rezistori de 1k în serie pe fiecare
Breadboard mic pentru montaj
Leduri : rosu(pin7) și verde(pin8) și rezistori de 1k în serie pe fiecare
Breadboard mic pentru montaj